2ポートSパラメータデータのGNDをGND以外につなぐ方法を考える。たまにしか役に立たない情報だけど、メモとして残しておく。
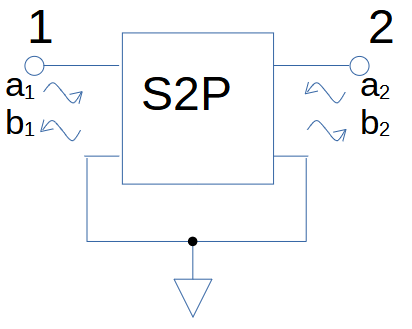
だいたいSパラメータの定義としてこんなのが書かれている。

\[ \begin{pmatrix} b_1 \\ b_2 \end{pmatrix} = \begin{pmatrix} S_{11} & S_{12} \\
S_{21} & S_{22} \end{pmatrix} \begin{pmatrix} a_1 \\ a_2 \end{pmatrix} \tag{1}\]
が、scikit_rfでs2pファイルを読み込むと、
こうなっちゃう。
GNDだった端子が共通化されるのはいいとして、最初から外部のGNDに接続されてしまうのは困っちゃう、、、ときもある。
つまり
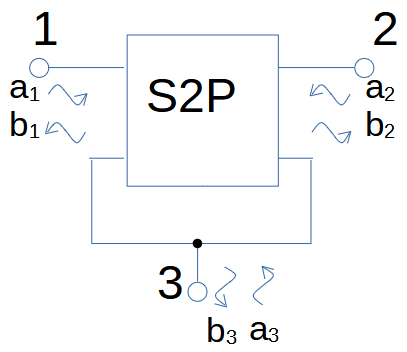
\[ \begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix} = \begin{pmatrix} S_{11} &
S_{12} & S_{13}\\ S_{21} & S_{22} & S_{23}\\ S_{31} & S_{32} & S_{33}\\ \end{pmatrix} \begin{pmatrix} a_1 \\ a_2 \\ a_3 \end{pmatrix} \tag{2} \]
こういうSパラを作りたいわけだ。
で、Sパラで考えようとすると、わたくしめのように電子系出身ではない外様には難しいので、Yパラで考える。
ここ(TDKさんの「Sパラメータによる電子部品の評価」)を見ると、SパラからYパラへの変換は、
\[ \hat Y=\frac{I-S}{I+S} \tag{3} \]
ここで、$\hat
Y$とは何だというと、規格化されたYパラメータということらしいけど、ここではあまり深く考えないほうがいい。TDKさんの「Sパラメータによる電子部品の評価」によると、 「$ \hat Y$は$ 1 \Omega $に規格化されたYパラメータ」とあるけど、どういう意味か分からない。 終端を$ 50 \Omega $に変換したのが$ \hat
Y$じゃないかと思っているんだけど、どうなんだろう。拙者のようなこわっぱにはまだ理解できない。
どうせ後でSパラに戻すことを考えると、ここではどうでもいいので触れない。
どうせ後でSパラに戻すことを考えると、ここではどうでもいいので触れない。
で、こういうことになります。
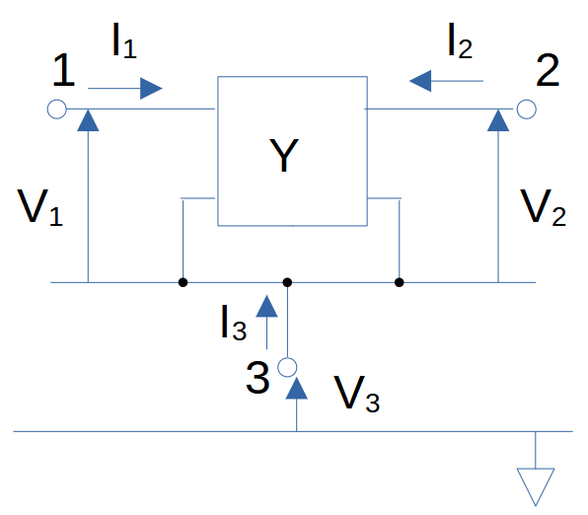
これがどう表されるかというと、
\[ \begin{eqnarray} \left\{ \begin{array}{l} \begin{pmatrix} I_1 \\ I_2 \end{pmatrix} =
\begin{pmatrix} Y_{11} & Y_{12} \\ Y_{21} & Y_{22} \end{pmatrix} \begin{pmatrix} V_1 \\ V_2 \end{pmatrix} \\ I_1+I_2+I_3=0 \end{array} \right. \end{eqnarray} \tag{4} \]
で、これをどうしたいかというと、
こうしたい。
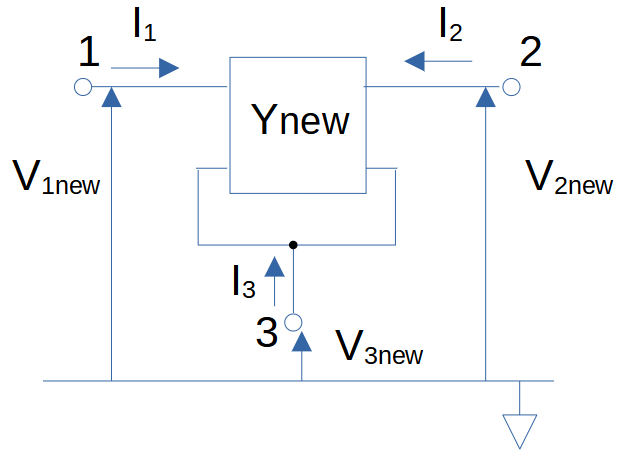
\[ \begin{pmatrix} I_{1} \\ I_{2} \\ I_{3} \end{pmatrix} = \begin{pmatrix} Y_{11new}
& Y_{12new} & Y_{13new}\\ Y_{21new} & Y_{22new} & Y_{23new}\\ Y_{31new} & Y_{32new} & Y_{33new} \end{pmatrix} \begin{pmatrix} V_{1new} \\ V_{2new} \\ V_{3new} \end{pmatrix}
\tag{5} \]
ただし、
\[ \begin{eqnarray} \left\{ \begin{array}{l} V_{1new}=V_1+V_3 \\ V_{2new}=V_2+V_3 \\
V_{3new}=V_3 \end{array} \right. \end{eqnarray} \tag{6} \]
で、これらをこねくり回すと、
\[ \begin{pmatrix} I_{1} \\ I_{2} \\ I_{3} \end{pmatrix} = \begin{pmatrix} Y_{11} &
Y_{12} & -(Y_{11}+Y_{12}) \\ Y_{21} & Y_{22} & -(Y_{21}+Y_{22}) \\ -(Y_{11}+Y_{21}) & -(Y_{12}+Y_{22}) & Y_{11}+Y_{12}+Y_{21}+Y_{22} \end{pmatrix} \begin{pmatrix} V_{1new} \\
V_{2new} \\ V_{3new} \end{pmatrix} \tag{7} \]
で、求めたい3ポートのSパラメータは
\[ \hat S=\frac{I-\hat Y}{I+\hat Y} \tag{8} \]
で求める。
まとめると、
s2pファイルを読み込んで、そのネットワークでS2Y(式(3))して、式(7)のようなY行列を持つ3ポートのネットワークを生成して、Y2S(式(8))すればよいってことになる。、、、しんど。
、、、今回Python使ってない、、、分類がおかしいが、、、まぁしょがない。人生には妥協も必要。
2022.02.02 式(7)に誤記があったので訂正しました。
コメントをお書きください